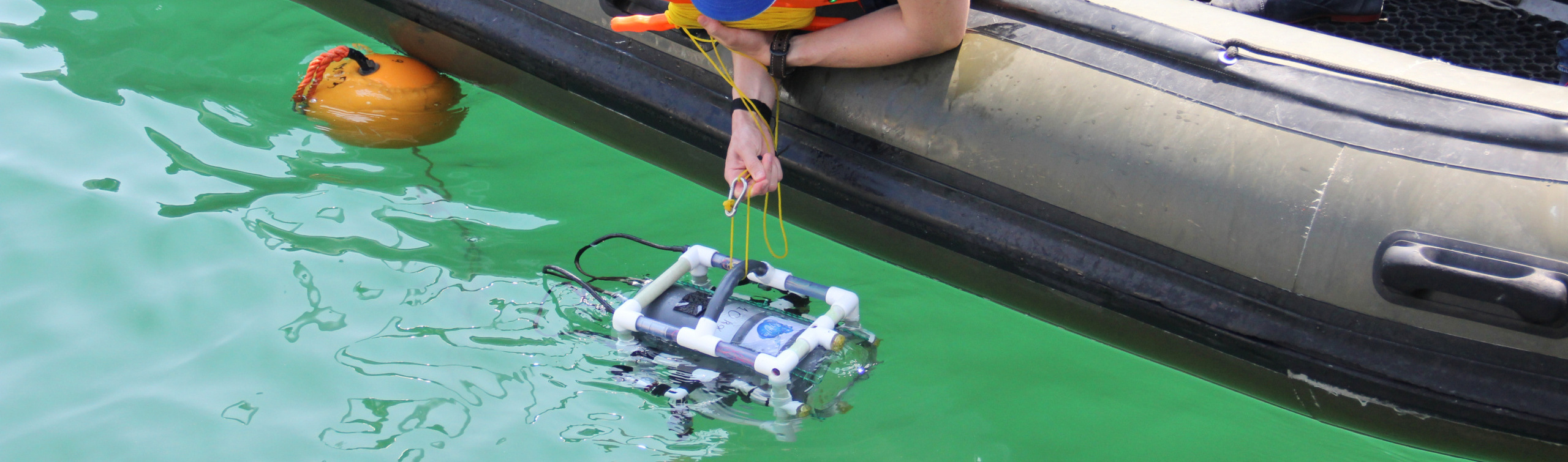
The competition was held in the CMRE seawater basin, offering the competitors a realistic setting.
Teams were ranked on three different task benchmarks (TBMs) and three functionality benchmarks (FBMs).
The TBMs are:
- TBM-1: Pipeline area inspection.
- The AUV has to reach through autonomous navigation the area where the damage has been reported. Once in the area, the robot has first to assess the entity of the oil leak (represented by coloured buoys to be mapped) and then inspect the pipeline assembly structure to localize and quantify the damage on a pipe (a red marker).
- TBM-2: Intervention on the pipeline structure.
- The robot first has to assess the entity of the damage with direct measurements on the pipes (i.e. staying in touch with one pipe for some time). Then it has to reach the manipulation console, recognizing it through the detection of a black number over a red background. Finally, it has to close the valve present on the console and grab a pole-ring and bring that on the surface.
- TBM-3: Complete I&M mission at the plant.
- TBM-3 combines TBM-1 and TBM-2 and proposes a complete I&M mission at the plant.
Teams did use data collected during the TBMs to produce outputs to be evaluated for three FBMs:
- FBM-1: mapping the area.
- The robot has to map the position of the coloured buoys.
- FBM-2: object recognition.
- The robot has to recognize and identify the coloured buoys (position and colour).
- FBM-3: shape recognition.
- The robot has to identify the black colour over the red background located at the manipulation console and its dimensions.
1 underwater robot is needed for each TBM. The robot needs to be capable of navigating in unstructured environments, sense the environment with optical and acoustic sensors (for underwater) and manipulate valves and other objects.
The robot is required to work autonomously in all the tasks, however, it can be tele-operated during tasks involving manipulation. The scoring will reflect the level of autonomy, the higher level of autonomy, the higher the score
Rules
Results
IEEE OES platinum sponsor provided awards and travel support to the teams.
| TBM-1: Pipeline area inspection | |||
|
Rank |
Team | A | P |
| 1st | AUV Team Tomkyle | 12 | 0 |
| 2nd | UNIFI Robotics Team | 11 | 0 |
| TBM-2: Intervention on the pipeline structure | |||
| Rank | Team | A | P |
| 1st | AUV Team Tomkyle | 17 | 0 |
| 1st | UNIFI Robotics Team | 17 | 0 |
| 3rd | Black Pearl | 4 | 0 |
| TBM-3: Complete mission at the plant | |||
| Rank | Team | A | P |
| 1st | UNIFI Robotics Team | 13 | 0 |
| 2nd | AUV Team Tomkyle | 10 | 0 |
| 3rd | Black Pearl | 5 | 0 |
Special awards (chosen by the Technical Committee)
Best presentation (teams were asked to give a presentation on their robot and team): AUV Team Tomkyle
Best team SAUC-E award (best results on the rankings of the three TBMs – in case of draw the award is given to the team with the best presentation): AUV Team Tomkyle
Best rookie team: Black Pearl (student voucher from Breaking the Surface sponsor)
Persistence award: OUBOT (altimeter from Blue Robotics sponsor)
Student vouchers from Breaking the Surface sponsor were given to AUV Team Tomkyle and UNIFI Robotics Team.
Sponsors

